
![Fiddler2下载2.2.0中文免安装版[HTTP数据抓包]](http://pic.9upk.com/soft/UploadPic/2012-5/201251714325864946.gif)
![Virtual 8085下载1.0 B2英文版[8085汇编模拟工具]](http://pic.9upk.com/soft/UploadPic/2012-5/20125171555630427.gif)
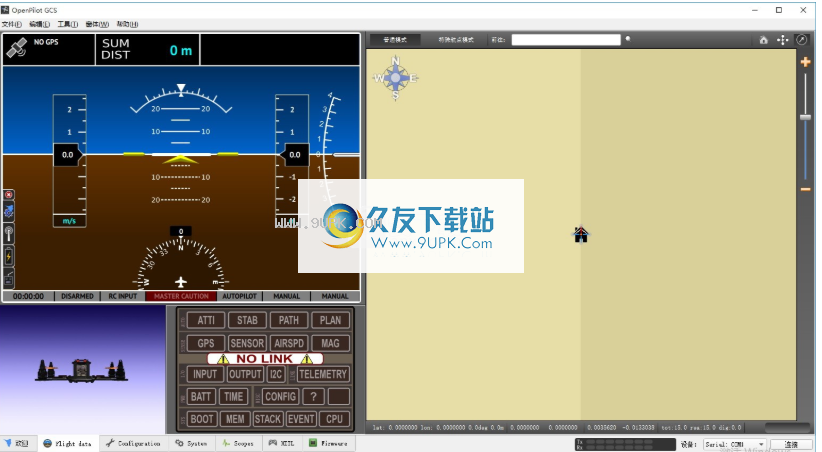
OpenPilot GCS是一款能够轻松进行cc3d调参的软件。一款专业的cc3d调参工具OpenPilot GCS。该软件具有内置的用户喜欢的飞行控制模块,该模块可以控制您的无人机和控制设备,并提供遥测调制解调器模块。该模块主要用于远程控制数据测试,然后根据测试结果确定控制参数。调整后,自动驾驶板主要用于控制具有相同参数的飞行设备,使设备无需人工即可自动飞行,并开发了测试程序,以帮助用户完成上述模块的编程; OpenPllot是下一代的开源无人机自动驾驶仪,它是一种高性能平台,适用于多旋翼飞机,直升机和固定翼飞机。它是由来自世界各地的热情的开发人员社区重新设计的。它的核心设计原则是质量,安全和易用性简单性不会妥协:没有硬编码的设置,完整的飞行计划脚本语言和其他强大的功能。 OpenPilot是功能强大的无人机自动驾驶平台;该程序增强了响应性为了简化调整,系统引入了一个新的响应性滑块,可让您修改操纵杆响应。为了获得最佳结果,用户需要尽可能使用PID调节系统以获得更好的稳定性。这将带来更好的稳定性,同时根据您的喜好做出柔和或敏锐的响应;功能强大且实用,需要它的用户可以下载体验
软件特色:
1.此应用程序用于固件上载,配置,控制和遥测监控。
2.支持所有可用的OpenPilot板卡。
3.支持在Windows,Linux x32 / x64和MacOSX上运行。
4. OpenPilot是由非盈利的个人硬件和软件开发商开发的真正的开源软件。
5. OpenPilot GCS是使用c ++中的qt5.2开发的。它使用QtGUI和QtQuick2来实现用于控制,通信和配置OpenPilot硬件的各种GUI解决方案。 OpenPilot GCS的设计与QtCreator相同,并且完全支持插件。
6.OpenPilot GCS是在Windows,Linux x32 / x64和MacOSX上开发,测试和构建的。
7.OpenPilot GCS使用其他几个开源库来提供地面控制站所需的功能。
8.可以实现飞行路线规划和GPS遥测跟踪功能,以获得更好的设计。
安装步骤:
1.需要它的用户可以单击本网站提供的下载路径来下载相应的程序安装包
2.通过解压缩功能打开压缩包,找到主程序,双击要安装的主程序,单击下一步

3.您需要完全同意上述协议的所有条款,然后才能继续安装该应用程序。如果没有异议,请点击同意按钮

4.弹出以下界面,只需使用鼠标单击下一步按钮,该界面就是程序信息界面,您可以根据需要选择

5.用户可以根据需要单击浏览按钮更改应用程序的安装路径。

6.等待应用程序安装进度条完成加载,需要等待一段时间

7.在安装过程中,将弹出一个驱动程序安装提示,只需按照提示进行安装

8.根据提示单击“安装”,将弹出程序安装完成界面,然后单击“完成”按钮。

软件功能:
1.您可以更改和移动图标选项卡。
2.支持无线快速设置。
3.也可以选择各种模式。
4.直观清晰的用户界面可以快速帮助用户入门,使用更加灵活。
5.让您快速获得所需的各种操作功能。
6.支持最新的OpenPilot Platinum GPS(V9)及其集成的磁力计;
7.支持同步(OneShot)和OneShot125输出模式
8.支持CC *目标的OneShot / OneShot125
9.添加一个易于设置的频道。通过GCS功能,添加了对完整性检查自定义钩子的支持
使用说明:
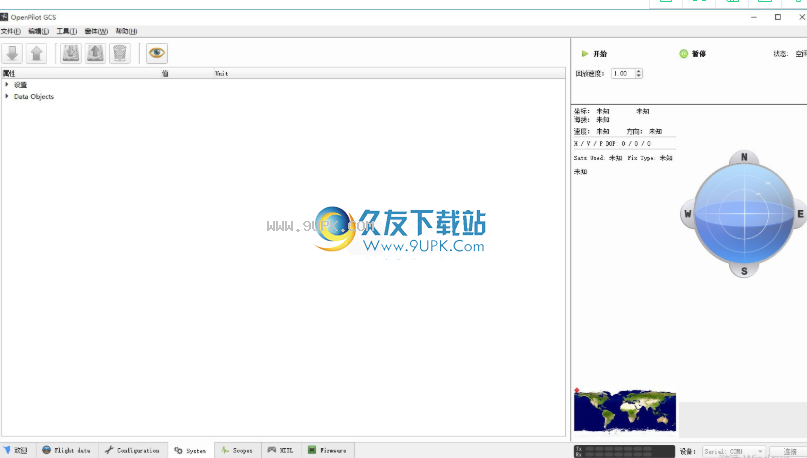
程序安装后,可以直接打开应用程序,并弹出相应的用户界面

您可以升级固件或升级固件并清除
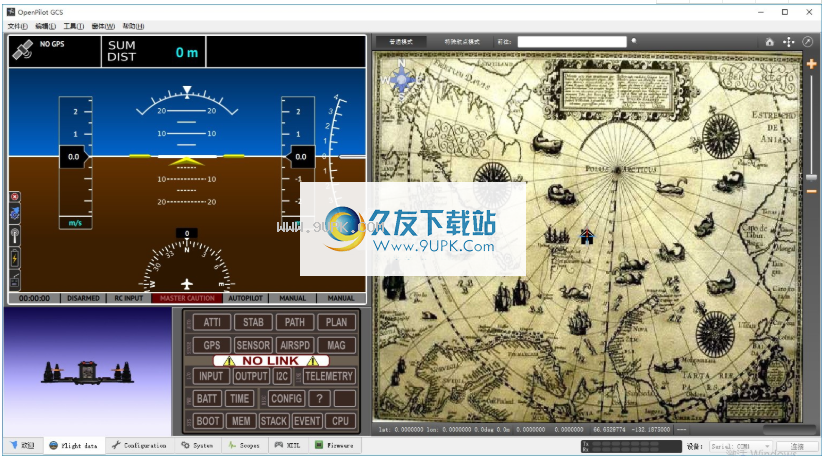
e根据以下步骤进行设置:
连接遥测;
系统成功识别设备后,单击上方的“终止系统”按钮;
您将看到设备清单清单;
您可以将固件刻录到设备,也可以将设备上的固件备份到计算机。

操作结束后,请单击“启动系统”。
此版本引入了重大的飞行性能改进,增强功能和错误修复。为了减少飞行控制器和ESC之间通信的停滞时间,已进行了许多改进。在我们的测试中,我们发现这不仅是迄今为止OpenPilot项目中最佳的飞行性能,还是所有我们测试过的项目中最佳的飞行性能。这是向所有人推荐的升级,并且您作为飞行员的技能越高,就越喜欢此版本。

帮助实现此目标的关键改进是增加了PWMSync代码路径,该路径默认情况下处于启用状态。 CC3D / CC受一些限制,因为它需要兼容的输入法来启用PWMSync。兼容的输入法是PPM,S.Bus,DSM和OPLink。此版本还引入了对支持OneShot125的ESC的支持,例如KISS ESC和BLHeli V13及更高版本中支持的所有ESC。请注意,OneShot125支持与CC和CC3D的PWMSync相同的限制。

CC3D / CC的注意事项:为了支持PWMSync / OneShot125 PPM,输入引脚已从早期版本更改为输入IO端口上的最后一个引脚,
其他增强功能包括将GCS的主要部分翻译成中文,并进一步提高了OPLink的可靠性,这使我们可以自信地说它可以用作主要控制链接和遥测技术。
主要侧重于新功能GPSAssist,这是一种用于多转子的辅助控制的新形式。
辅助控制根据现有的飞行模式提供辅助功能。
GPSAssist是OpenPilot提供的第一个辅助控制选项。 GPSAssist支持姿态和姿态飞行模式,并在俯仰/侧倾杆居中时激活制动器以保持位置。
姿态/姿态可以使用任何当前推力模式(手动,巡航控制,altvario)飞行。 GPSAssist for PositionHold飞行模式还将在首次进入飞行模式时引入制动顺序,并引入altvario作为推力模式。

新的Acro +飞行模式,“类固醇”上的费率模式;
油门PID调节:根据油门自动调节PID;
世博会支持;
设置向导的一些附加功能,例如固定翼支持,GPS选择,TriCopter伺服速度选择和ESC校准;
Cloud Config的第一个实现。此版本中的Cloud Config是将来用于共享车辆设置的基于社区的分布式系统的第一个版本;
重新设计了PFD艺术品和广告
对Revolution平台的GPS /导航功能进行了许多添加和更改,包括GPS辅助的飞行模式:返回基地,位置保持,自动巡航和位置更改(LOS,FPV和NSEW)。
稳定的重建和增强的功能可以实现更好的飞行性能。
全新的传感器校准程序和大大增强的GUI。
其他第三方硬件支持,尤其是基于MS4525DO和WS281x LED驱动器的空速传感器。
嵌入式固件和GCS的性能得到改善。
提供一些标准方法来校准主板的CPU速度和负载测量
重构的OPLink无线电驱动程序。删除了自动配置,并添加了单向链接,包括仅要求PPM链接时仅使用ppm模式的预期用途。仅PPM模式将调制解调器配置为以9600 bps(空中数据速率)运行的单向链路,并且仅发送PPM数据包。

为新版本提供CC3D样式功能。
Revolution平台(使用Revo的内部调制解调器和外部OPLinkMini板)。高级功能,例如高度保持,位置保持,导航和返回主页,自动着陆仍在开发中,并将在将来的版本中提供。这些功能的可用性将取决于有多少人可以为代码,测试和文档做出贡献。
请记住,第一批Revo硬件适用于开发人员/前端测试人员,而不适用于希望100%使用最终平台的最终用户。
此版本需要新的引导程序来支持新功能,例如
作为擦除设置等。与往常一样,
引导加载程序不需要更新即可使用引导加载程序来更新程序固件文件的任何特殊编程器硬件。

固件文件夹已被删除。
在此版本中,固件文件夹已被删除。这些文件现已集成到GCS中,因此它们始终是最新的,并降低了固件不匹配的风险。要更新固件,您必须使用车辆设置向导(“欢迎使用GCS”标签上的绿色右大按钮)或GCS固件标签上的新的“自动更新”按钮。
自动更新固件。
此功能简化了所有OpenPilot板固件更新。现在,您要做的就是单击“固件”选项卡上的“自动更新”,然后按照说明刷新OpenPilot主板。这本质上与Rescue相同,但是使用嵌入式固件映像,因此无需继续浏览。
删除设置选项。
以前,我们采用骇人听闻的方式从OpenPilot开发板上删除错误或不兼容的设置。不建议执行该操作的旧的特殊固件,并且该功能现已集成到最新版本的引导加载程序和固件中。
要清除设置,请进入DFU(启动)模式(使用“暂停”或“救援”功能),然后单击“固件”选项卡上的“擦除设置”按钮,然后按照说明进行操作。这不适用于较早的引导程序,如果检测到过时的引导程序,则“清除设置”按钮将被禁用。
语言默认设置。
GCS现在使用系统默认语言(当前仅提供法语和英语,请提供翻译)。您可以在GCS选项中更改语言。
CDC驱动程序安装选项(仅Windows)。
这是一个可选的USB虚拟串行端口,例如,使用U-Blox u-Center软件更新GPS配置。
正常配置OpenPilot板不需要它。如果未安装,则虚拟串行端口功能将不可用。该驱动程序未由Microsoft签名,但实际上它使用Windows的串行端口驱动程序,OpenPilot仅提供驱动程序信息INF文件。
许多帮助工具提示已添加到GCS。将鼠标悬停在GCS中的选项上会显示它们,请转到调整/配置。
许多常规改进,代码清理和小错误修复。
在Linx上,如果以前是OpenPilot软件包,则应将其删除并安装,然后再安装此新软件包。这是一个已知问题,以后可能会修复。
由于USB描述符已更改为支持新功能,因此USB驱动程序
Windows必须更新。如果使用Rescue或Wizard或Auto-Update按钮后,GCS无法连接到开发板,则在这种情况下您可能遇到USB问题。要解决此问题,您应该删除旧的驱动程序(带有黄色的感叹号),并允许Windows重新找到它们。

 LOL皮肤宝贝 2.9免安装版
LOL皮肤宝贝 2.9免安装版 诚成LOL皮肤盒子 3.18最新免安装版
诚成LOL皮肤盒子 3.18最新免安装版 冰狼lol换肤助手 1.1最新免安装版
冰狼lol换肤助手 1.1最新免安装版 火柴LOL自制皮肤更换器 1.1绿色最新版
火柴LOL自制皮肤更换器 1.1绿色最新版 lol小屋皮肤工具盒子 1.1最新版
lol小屋皮肤工具盒子 1.1最新版 陌小宇LOL皮肤挂载器 1.1免安装版
陌小宇LOL皮肤挂载器 1.1免安装版 百特LOL换肤工具 1.6免费最新版
百特LOL换肤工具 1.6免费最新版 南部LOL皮肤辅助工具 3.8最新免费版
南部LOL皮肤辅助工具 3.8最新免费版 LOL畅萌皮肤助手 1.0.2.6安卓版
LOL畅萌皮肤助手 1.0.2.6安卓版 爱好LOL换肤助手 1.3最新免安装版
爱好LOL换肤助手 1.3最新免安装版 爱易云lol换肤盒子破解版 400603最新绿色版
爱易云lol换肤盒子破解版 400603最新绿色版 爱易云lol换肤大师破解版 6.11最新免费版
爱易云lol换肤大师破解版 6.11最新免费版 Visual Studio 2012是目前微软官方发布的VS软件中最稳定的版本,并具备功能非常强大的测试和调试工具,大大的方便了开发人员开发应用程序的时间,提高工作效率。有需要的用户欢迎来久友下载站下载~
Visual Studio 2012是目前微软官方发布的VS软件中最稳定的版本,并具备功能非常强大的测试和调试工具,大大的方便了开发人员开发应用程序的时间,提高工作效率。有需要的用户欢迎来久友下载站下载~  FairyGUI Editor可以帮助设计师们设计出更多的设计软件图标,通过它可以实现零代码的设计操作,帮助设计师们轻松的完成更多的设计作品!!!有需要的用户欢迎来久友下载站下载~
FairyGUI Editor可以帮助设计师们设计出更多的设计软件图标,通过它可以实现零代码的设计操作,帮助设计师们轻松的完成更多的设计作品!!!有需要的用户欢迎来久友下载站下载~  用户可以通过CSS图片获取工具从CSS文件中批量提取出图像文件,有喜欢的用户不要错过了。
用户可以通过CSS图片获取工具从CSS文件中批量提取出图像文件,有喜欢的用户不要错过了。  老菜鸟API管理器可以帮助用户支持更多的数据搜索,是想要进行易语言学习和开发者必备的工具之一,而且软件操作简单,界面整洁,有需要的用户快来下载吧。
老菜鸟API管理器可以帮助用户支持更多的数据搜索,是想要进行易语言学习和开发者必备的工具之一,而且软件操作简单,界面整洁,有需要的用户快来下载吧。  DBF Viewer可以帮助用户编辑、分类、查询和删除副本、创建打印数据库表,还可以进行输出各种不同类型的格式,有需要的赶快来下载吧。
DBF Viewer可以帮助用户编辑、分类、查询和删除副本、创建打印数据库表,还可以进行输出各种不同类型的格式,有需要的赶快来下载吧。  QQ2017
QQ2017 微信电脑版
微信电脑版 阿里旺旺
阿里旺旺 搜狗拼音
搜狗拼音 百度拼音
百度拼音 极品五笔
极品五笔 百度杀毒
百度杀毒 360杀毒
360杀毒 360安全卫士
360安全卫士 谷歌浏览器
谷歌浏览器 360浏览器
360浏览器 搜狗浏览器
搜狗浏览器 迅雷9
迅雷9 IDM下载器
IDM下载器 维棠flv
维棠flv 微软运行库
微软运行库 Winrar压缩
Winrar压缩 驱动精灵
驱动精灵