



SARscape是一款专业的雷达图像处理软件。雷达图像处理就来使用SARscape。可以在软件上读取雷达图像,可以在软件上优化SAR数据,可以处理地形数据,可以处理无人机图像,可以建立数据模型,可以优化有缺陷的图像,并且用户可以由此分析各种雷达图像数据软件对于需要研究SAR数据的朋友非常有帮助;该软件提供了支持雷达强度图像处理,雷达干涉测量和极化雷达干涉测量的多个功能模块,可以满足大多数雷达数据分析行业的需求,无论是地形分析还是数据建模都可以通过该软件执行。将收集的雷达SAR数据导入到软件中以执行各种分析,例如城市测绘,森林测绘,农业监测,洪水/湿地监测,荒漠化监测,土地覆盖测绘等。方便提供帮助!
软件功能:
建筑学
SARscape提供了全面的SAR数据处理功能,并引入了GPU以提高处理效率,其中包括:
-SAR强度图像
-雷达干涉测量(InSAR / DInSAR)-极化雷达处理(PolSAR)
-极化雷达干涉测量法(PoIInSAR)
由以下模块组成:
1,SARscape核心模块(BASIC和InSAR捆绑包)
提供完整的雷达处理功能,包括基本SAR数据导入,多视图,几何校正,辐射校正,降噪,地理编码,RAW数据镶嵌,线性特征检测,特征提取以及一系列基本处理功能;支持InSAR和多通道DInSAR处理以生成干涉图像,相干计算,地面断层图,DEM等。包括基线估计,干涉图生成,干涉图展平,相干生成,相位展开,轨道细化,大气校正,变形模型等。
2,聚焦模块
优化的聚焦算法可以充分利用处理器的性能来实现快速的数据聚焦处理,支持聚焦前的RAW数据拼接,并直接输出SLC数据。
3,过滤器扩展模块(Filter Module)
提供了基于Gamma / Gaussian分布模型的滤波器核心,可以最大程度地消除斑点噪声,同时保留雷达图像的纹理属性和空间分辨率信息。
4,ScanSAR干涉仪模块(ScanSAR干涉仪模块)
支持对ASAR扫描模式数据的干扰处理。
5.偏振计和PollnSAR模块(偏振计和PollnSAR模块)
极化SAR和极化干涉SAR数据的处理。
6,干涉测量堆叠模块(Interferometry Stacking Module)
-提供了永久散射体(PS)法和短基线集(SBAS)法,可以对多时相雷达数据进行干扰分析,并获得毫米级的变形信息。
SARscape在模块中提供API。用户只需要具备一些IDL开发基础即可进行二次开发并提供200多个功能接口。
安装方式:
1.将主程序安装到计算机上,单击“下一步”。

2,软件安装协议内容,点击接受
3,安装地址C:\ Program Files \ SARMAP SA \ SARscape 5.2
4.提示安装其他项目,请单击“下一步”。
5.软件安装准备界面,点击安装
6.提示软件安装进度条,等待主程序安装结束

7,显示计算机重启,可以选择以后重启

软件特色:
SARscape由sarmap公司开发,是国际知名的雷达图像处理软件。该软件基于专业的ENVI遥感图像处理软件,提供图形化操作界面,并具有专业的雷达图像处理和分析功能。
SARscape由核心模块和5个扩展模块组成。用户可以根据自己的应用需求和财务状况合理选择不同的功能模块及其不同的组合,量身定制系统,充分利用软,硬件资源,最大程度地提高用户满意度。专业的应用程序要求。
SARscape主要用于地形数据(DEM)提取,地表沉降监测,滑坡/冰川运动监测,目标识别和跟踪,原油泄漏跟踪,农作物生长跟踪,农作物产量评估以及洪水,火灾和地震的灾难评估。
操作环境:
SARscape软件需要运行
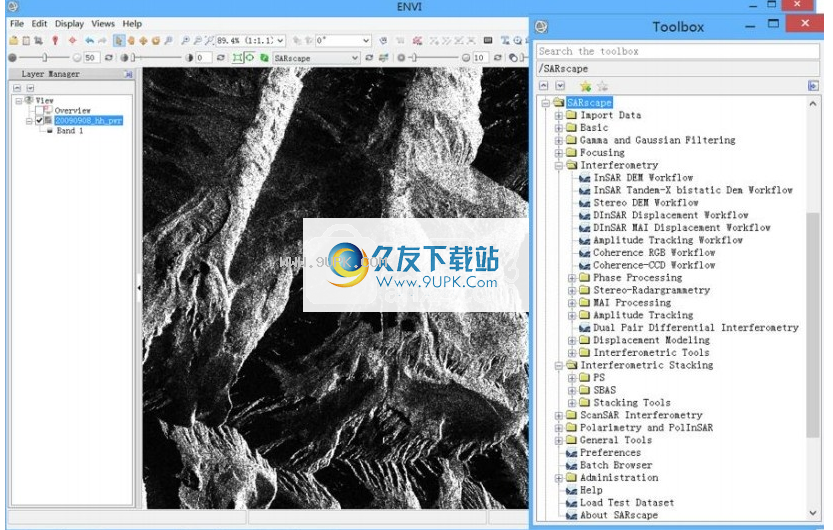
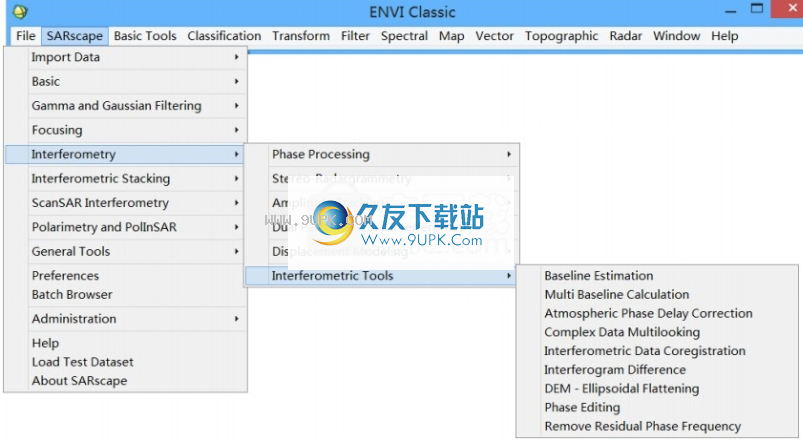
在ENVI环境中,它支持ENVI5版本,并且可以同时安装在ENVI5接口和ENVI CLASSIC接口下。操作方法相同。显示样式基于ENVI5平台,具有以下两种类型:

图1.1 ENVI5界面下的SARscape
软件图1.2 ENVI CLASSIC界面下的SARscape软件
官方教程:
GCP属性编辑
在创建GCP的过程中,您可以添加和修改有关给定点的信息,例如名称,速度和日期(图3)。如果要编辑或修改创建的点,请单击“编辑/修改”单选按钮,以便可以直接在图像上选择这些点。否则,您也可以在GCP列表上单击其名称。选择GCP后,您可以将其移动到位。如果需要再次添加新点,请选择“插入”单选按钮(图3)。
您还以修改现有的GCP xml(或shp)文件。只需启动“ Generate GCPs tool”(生成GCP工具),选择输入,参考和DEM文件,然后使用加载功能。 GCP可以用相同的方式修改。

图3:可以修改GCP属性的部分,可以在插入和删除之间切换单选按钮
编辑/修改。
仅当必须将GCP文件用于干涉测量(尤其是用于位移映射)时,才输入速度参数。 GCP来自通常在地面真相战中收集的测量值,必须在此处将其输入为速度单位(毫米/年)。如果收集的信息以公制单位(例如,毫米或厘米)而不是速度提供,则必须考虑主设备和从设备之间的时间间隔以进行转换。
例如,在35天的距离内获的一对干涉仪的50 cm同震位移将对应于大约5214 mm /年的速度(500÷35 * 365)。
重要的是要注意,这些速度场只能与在制图坐标中提供位置的GCP关联(即“地图X”,“地图Y”和可选的“高度”);反之亦然,当输入GCP位置时用作文件坐标(即“图像X”和“图像Y”)时,将不考虑这些字段。如果未提供此参数,则GCP位移速度设置为零(稳定点)。
有关插入这些数据的信息可在第25页的相应部分中找到。
GCP文件结构(xml格式)
GCP xml文件在该字段中包含多个区域。每个单个GCP的信息都位于该字段中。这些字段可能会有所不同,具体取决于GCP收集的几何形状和类型。通常,这些字段包含有关制图系统,坐标(倾斜范围或地理位置),速度和外观(对于倾斜范围几何形状)的信息。要查看或修改GCP xml文件,请使用文本编辑器或代码编辑器(例如Notepad ++)将其作为文本文件打开。
几何GCP
如果卫星轨道或数字高程模型的地理位置不准确,则需要相对于参考数字SAR数据(即干扰对的主要集合)校正地面控制点(即“几何GCP文件”)。高程模型几何图形GCP可用于手动轨道连接,干涉测量过程的开始和地理编码。
提示:如果研究区域的特征是“明显的”地形,则可以使用使用DEM来校正输入图像的“自动轨道校正”,而无需使用GCP。
注意:您可以使用两眼按钮直接启动用于几何GCP的“创建GCP”工具。该按钮可以在多个面板中找到,例如“干涉图生成”面板(图4),“三维匹配过程”面板,“ MAI干涉测量过程”面板,“幅度跟踪过程”面板,“双对”差分干涉术”面板和“地理编码”面板。
请注意,在干涉式工作流程过程中无法插入Geometry GCP文件。
图4:“干涉图生成”面板中的几何图形GCP输入。

手动轨道校正工具
有时,对SAR图像进行地理编码时,轨道数据中的问题可能会导致较小的偏移量。这意味着在经过地理编码的SAR图像和参考图像上,相同的坐标不在同一要素上(图5);红叉表示两个图像上的坐标相同。

图5:相对于参考光学图像(右),红叉表示相同的坐标落在地理编码SAR图像的错误位置(左)。
根据研究区域中可获得的良好参考图像,主要可以选择两种方法。以下小节将说明这些方法。
跟踪纠正
在参考图像上
如果有参考图像(例如高分辨率光学图像),则可以选择此方法。要开始校正,请在“常规工具”>“轨道校正”>“手动校正”中打开“轨道手动校正”工具。请在输入文件中插入要校正的图像(在倾斜范围内)。然后单击双目按钮以创建必要的GCP文件(图6)。
输入文件加载完毕后,双目button按钮将启动“生成地面控制点”工具。 DEM和参考文件必须手动插入。单击“下一步”按钮,这两个图像将在ENVI中打开。左边是要校正的图像,右边是参考文件(图7)。
此时,应该找到可以在两个图像中看到和识别的独特功能。例如,建筑物或十字路口。在此示例中,选择了交点的中心。在参考图像(屏幕右侧)上单击此功能,ENVI将自动在“倾斜范围”(屏幕左侧)中绘制等效点。由于轨道信息中的错误,将无法正确投影此点(图8)。
在这一阶段,GCP将显示在GCP列表中(图9);单击它可以修改此GCP,或选择“编辑/修改”单选按钮,然后在图像上选择GCP。您可以手动插入正确的倾斜范围坐标,也可以将红色的“加号”移动到正确的位置(相交的中心),如图10所示。
笔记
由于倾斜范围的几何形状,下降的数据向西翻转,而上升的数据向南翻转。因此,应注意在两个图像中查看相同的功能。
在同一特征上投影两个十字后,在“创建GCP”面板中单击“完成”。这会将创建的GCP文件插入“轨道校正”面板。单击“执行”以运行它并更正图像。现在可以对经过校正的倾斜范围图像进行地理编码,而不会产生偏移(图11)。
图6:手动轨道校正面板(左)和地面控制点生成面板(右)。在“ Generate GCP”面板中,将自动插入输入文件。 DEM文件和参考文件必须手动插入。

图7:在ENVI中的两个不同视图上生成具有两个不同几何形状的GCP环境。右:高分辨率光学图像(参考文件),左:必须校正的倾斜范围的图像(输入文件)。

注意:“层管理器”中有两个单独的GCP树结构。
图8:高分辨率光学图像上的交点中心(绿色“加号”,右)和倾斜范围图像上错误的投影(红色“加号”,左)。
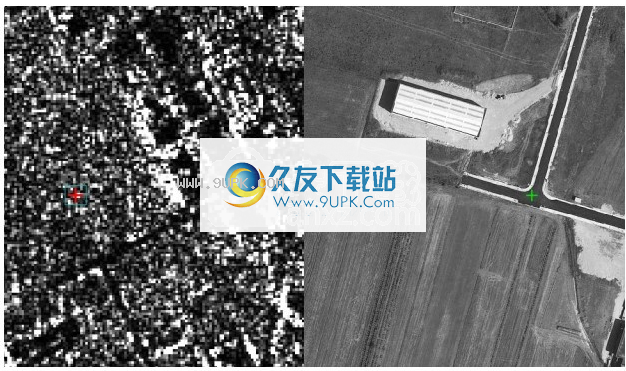
图9:在“生成地面控制点”面板中创建的GCP。
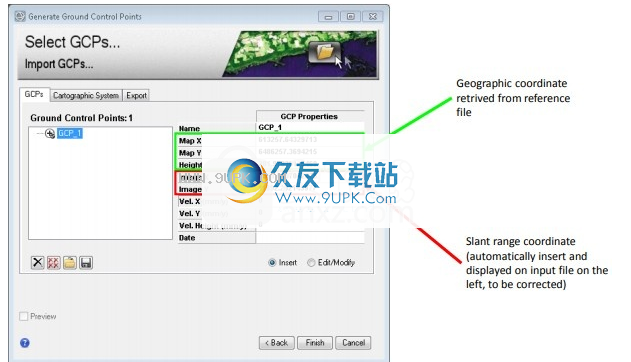
图10:倾斜范围图像上的红色“加号”(左)的位置已从错误的位置更改为正确的位置,以匹配参考图像的相同位置(绿色的“加号”,右)。

图11:红叉代表相同的坐标,并且现在落在SAR图像(左)与参考图像(光学,右)相同的正确位置上。

使用已知坐标进行轨道校正(无参考图像)
基本上,此方法的工作方式与上述小节中描述的参考图像相同。在这种情况下,仅将要校正的图像插入“生成地面控制点”面板。
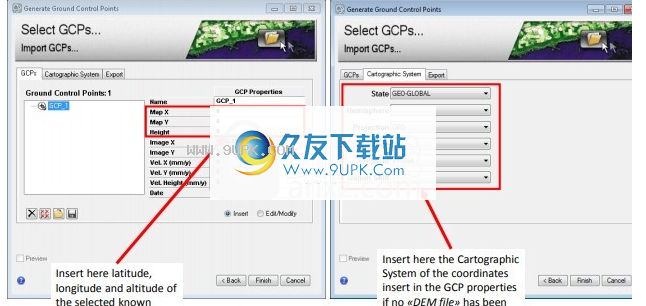
应该找到具有已知坐标的要素,并在其上创建GCP。然后,您可以插入正确的坐标(纬度,经度和海拔高度)(图12)。单击“完成”,然后将GCP文件插入“轨道校正面板”。点击“执行”。要运行它并校正倾斜范围图像。
笔记
如果输入文件在倾斜范围内并且未插入“ DEM文件”,则必须在适当的“绘图系统”选项卡中插入GCP属性。
目标映射系统。如果已插入DEM,则坐标必须在同一映射系统中。
图12:在知功能上创建的GCP。然后,应将坐标和高度插入GCP属性中,如果未选择DEM文件,则必须在适当的选项卡中选择其映射系统。
相位处理(干涉测量)
精炼GCP文件是干涉测量过程中“精炼”步骤所需的必需文件。必须检索相位并在所选区域中展开相位。
您可以选择倾斜的几何形状(范围和方位角)或地理编码的几何形状(x,y,h,其中可以从GCP生成工具的输入DEM中自动检索h)来选择地面控制点以进行细化。两个几何形状。
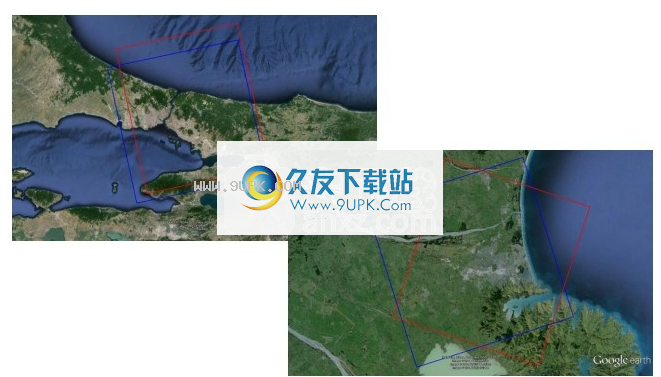
通常,在倾斜范围内选择GCP。如果将GCP用于更多重叠的轨道/帧作为锚点(图13中显示了两个示例),则应在地理编码的几何图形中最好使用它们,并充分覆盖相邻轨道重叠的区域。这对于避免偏移很重要
同一区域中不同轨道/帧之间的相位值。因此,该软件能够对精炼期间使用的倾斜范围几何进行内部地理编码。
图13:重叠区示例。
在展开的相位文件中选择GCP点位置的最重要标准如下:
不应有高频残留的地形条纹
不应有位移条纹,因此,如果知道,它离位移区域很远。
除非在输入中提供已知的位移率(例如,外部测量的结果),否则所选GCP的位移率被认为是0
不应存在与拆包错误相对应的相位跳变。如果某个点位于孤立的相位“岛”中,并且其扩展值较差,则可以将其视为相位斜坡的一部分,并导致整体误差校正。
如果指纹显示出系统的采集几何误差(轨迹不精确),则GCP应该覆盖整个轨迹/帧(始终遵循上述标准)以消除这种影响。
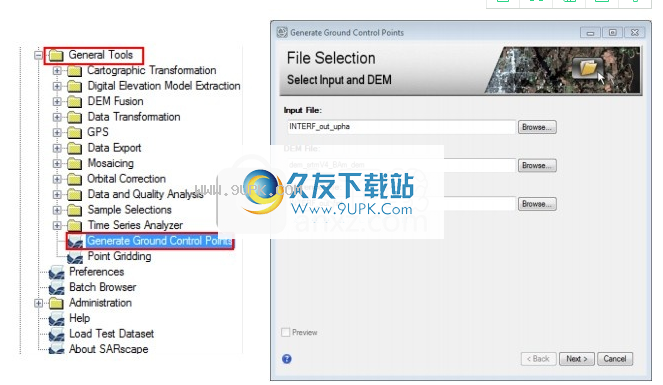
启动“常规工具”中的“生成控制点”工具后,将出现以下面板(图14),其中必须插入_upha,_dem和_fint文件。之后,点击下一步>继续生成GCP。
笔记
在干涉式工作流程中(例如:InSAR DEM工作流程,DInSAR位移工作流程等),或者通常,如果使用双目按钮创建了GCP,并且路径已插入到面板中,则会自动选择三个输入文件。
图14:“生成地面控制点”,“文件选择”面板。
此时,GCP工具将在ENVI中打开_upha和_fint图像。使用“层管理器”中文件名左侧的复选框,您可以按照与普通ENVI会话相同的方式,从一个图像切换到另一个图像(图15)。图16显示了如何将色标更改为模糊图像,以更好地理解相位数据。
图15:由GCP生成工具自动打开的_upha(在顶部)和_fint(在底部)图像(这是相移处理的示例)。
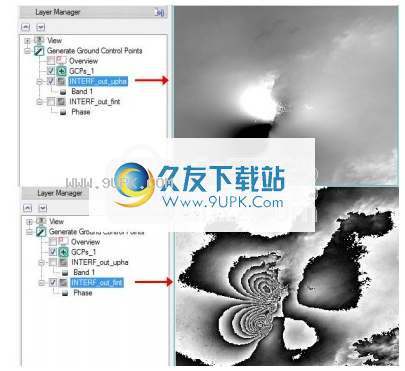
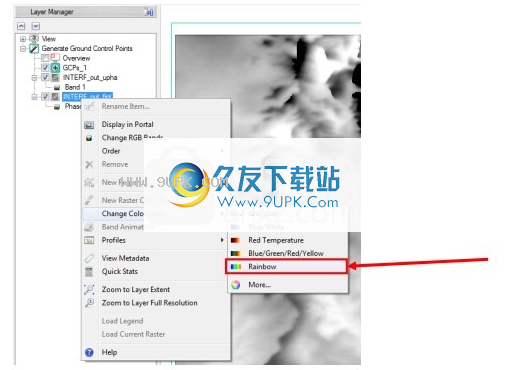
图16:右键单击>“更改颜色表”>“彩虹”可以更好地可视化并解释fint图像的值。
如前所述,选择GCP位置的一种好方法是找到一个远离运动条纹的稳定区域(图22),这与残余轮廓条纹的展开误差和相位跳变相对应。具有良好平坦度(甚至火石上的颜色)的区域是GCP的良好候选区域。另外,需要在整个场景中分布几个点以创建DEM并消除系统的采集几何误差(轨道误差)。建议远离陡峭的地形和残留的地形条纹,并建议在谷底选择GCP(图17,图18和图21)。
笔记
如果执行了位移分析并且没有系统的采集几何误差(轨道误差),则一个GCP就足够了(图22)。
图19(右下图)显示了展开错误的示例。实际上,如果沿着图20画出沿相位跳变的曲线,则可以注意到这种情况下跳变测量2个周期的精确度。
如果您打算使用不同的几何形状(上升和下降)或不同的传感器来处理相同的研究区域,建议对_fint文件进行地理编码,并使用这两个文件创建GCP,以使点位于被覆盖的区域内两个几何形状向上(图24)。为此,应对两个几何_fint文件进行地理编码。
笔记
在此过程中应引起注意。在开始创建GCP之前,请检查研究区域中是否没有部署错误。
图21和图23中的示例显示了通过优化GCP来优化轨道边缘的效果。通过细化步骤,如何消除出现在左侧图像上的明显相位斜率,这是显而易见的。实际上,默认情况下,该软件会将所有GCP视为稳定点,并计算必须去除的相位分量。
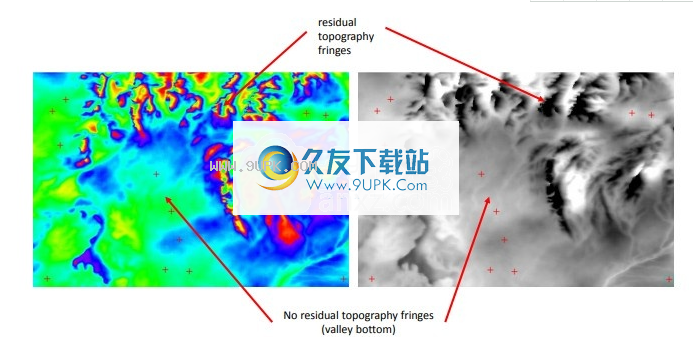
图17:用于相变高度处理的GCP。 GCP(红色“加号”)的位置远离其余地形的边缘和山顶(左:包裹的phase_fint,右:未包裹的phase_upha)。
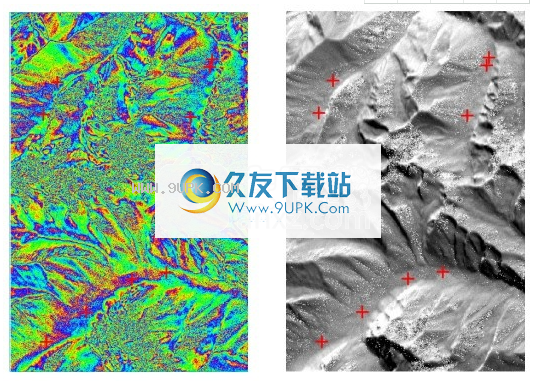
图18:建议在此山区的山谷底部创建精制的GCP。左侧的_fint图像,右侧的_upha图像。
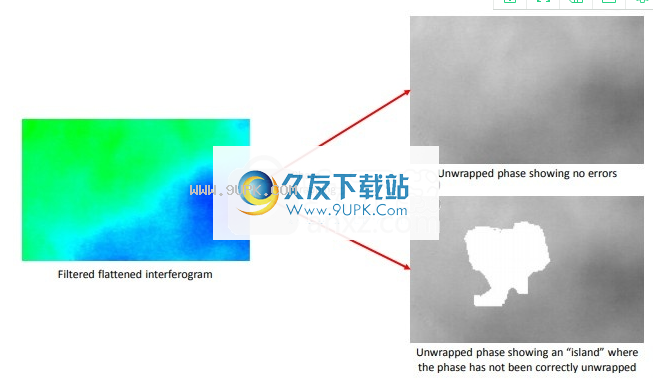
图19:数据打包不好的示例(右下),而数据打包好的示例(右上)则与之相反。
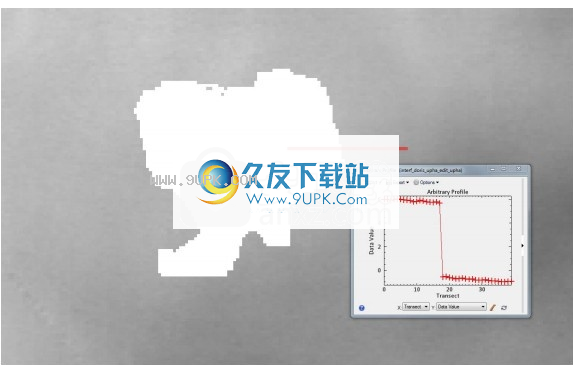
图20:展开阶段_upha中的错误分析
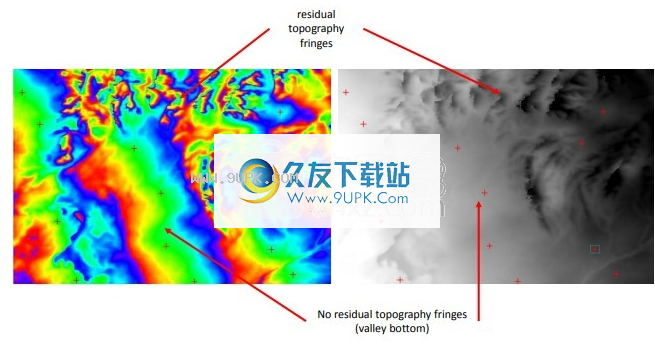
图21:用于数据的相高处理的GCP,显示了引起相倾斜的轨道条纹。
GCP(红色“加号”)位于远离残余地形条纹并且距离山顶(左:包裹的phase_fint,右:未包裹的phase_upha)的位置残余地形条纹位移条纹
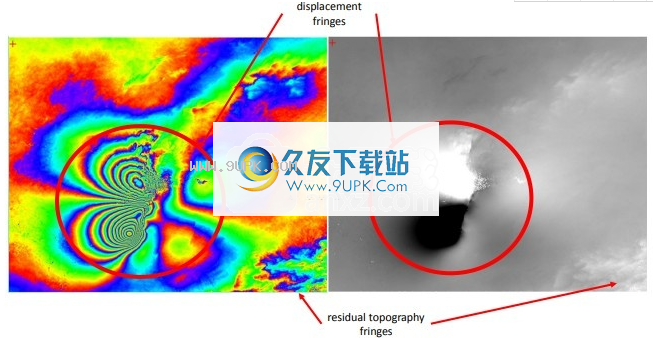
图22:用于相变处理的GCP。唯一的GCP位于远离残余地形带和位移带的位置(左:包裹的phase_fint,右:未包裹的phase_upha)。
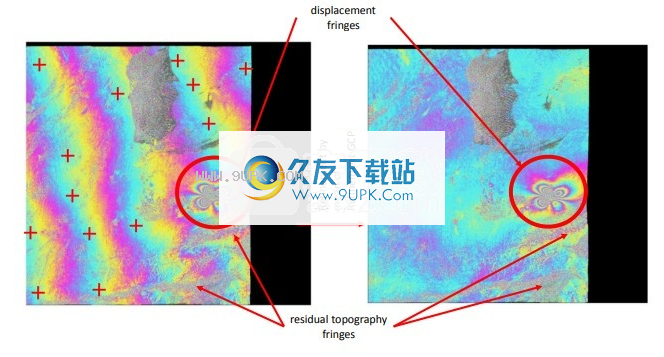
图23:通过细化GCP(红色“加号”)从展平的干涉图中去除了轨道条纹的示例。与图22相反,仅需要一个或多个点即可删除斜率。
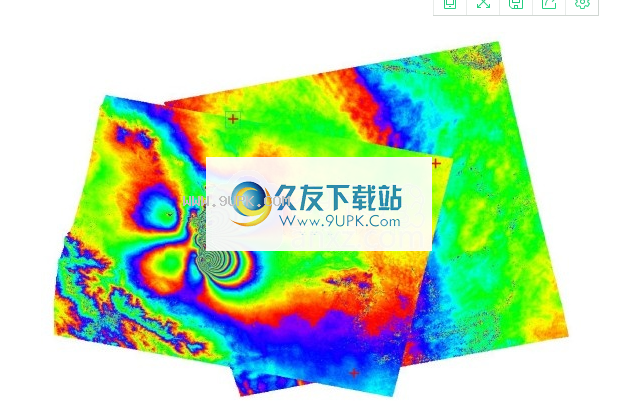
图24:从下降(左)和上升(右)几何图形获得的_fints上的GCP。这些点位于两个几何都覆盖的区域中,不受移动和残留地形条纹的影响
迅速的
选择``关注区域''时,建议选择稍大一点的区域以确保位移区域之外有一个区域,以便更有可能选择可靠的GCP。
为了改善赛道,必须至少使用7个(有效)GCP。相反,如果必须执行多项式优化,则地面控制点的最小数量必须等于“剩余相位丰度”;否则,收敛将自动降低。

 成山头 1.0.2安卓版
成山头 1.0.2安卓版 大驾 1.0 安卓版
大驾 1.0 安卓版 自游行 1.0 安卓版
自游行 1.0 安卓版 流溪河 1.0.2安卓版
流溪河 1.0.2安卓版 万里行自驾游 1.0.3安卓版
万里行自驾游 1.0.3安卓版 自驾宝路图 2.1.0安卓版
自驾宝路图 2.1.0安卓版 自驾精灵 1.0安卓版
自驾精灵 1.0安卓版 德国自驾购物 2.0安卓版
德国自驾购物 2.0安卓版 自驾中国 1.2安卓版
自驾中国 1.2安卓版 欧拉自驾 3.2安卓版
欧拉自驾 3.2安卓版 自驾e族 1.1.2安卓版
自驾e族 1.1.2安卓版 法国自驾攻略 1.0 安卓版
法国自驾攻略 1.0 安卓版 MAGIX Photo Manager可以把你电脑中的图像归类管理,如果你电脑上的图片特别多,通过这款软件可以有条理的管理起来。MAGIX Photo Manager 为照片集排列顺序。如果需要,照片可以在归档文件中进行编辑。有需要的用户欢迎来久友下载站下载~
MAGIX Photo Manager可以把你电脑中的图像归类管理,如果你电脑上的图片特别多,通过这款软件可以有条理的管理起来。MAGIX Photo Manager 为照片集排列顺序。如果需要,照片可以在归档文件中进行编辑。有需要的用户欢迎来久友下载站下载~  Kandao Studio拥有VR视频 图片拼接和VR实时直播功能,可以对看到科技Obsidian 系列VR相机拍摄的高分辨率、高帧率素材做无缝拼接,采用强大的拼接算法和图像处理技术,简化VR素材的制作流程,并大幅提高了VR素材拼接...
Kandao Studio拥有VR视频 图片拼接和VR实时直播功能,可以对看到科技Obsidian 系列VR相机拍摄的高分辨率、高帧率素材做无缝拼接,采用强大的拼接算法和图像处理技术,简化VR素材的制作流程,并大幅提高了VR素材拼接...  Kandao Raw+相信大家都会用得到的,可以进行Raw图片处理,还能帮助相机更好地捕捉到图片的细节,使用Kandao Raw+正式版可以在弱光的情况下减少噪音,还能增加动态的范围,可以兼容多种格式,有需要的你不要再等了
Kandao Raw+相信大家都会用得到的,可以进行Raw图片处理,还能帮助相机更好地捕捉到图片的细节,使用Kandao Raw+正式版可以在弱光的情况下减少噪音,还能增加动态的范围,可以兼容多种格式,有需要的你不要再等了  PHIIMAX 3D相机可以将惊艳发挥到浑然天成的地步,支持12K全景图片视频拍摄,提供高性能稳定3D VR直播方案,足以和百度3D街景媲美,搭配这款处理软件更是如虎添翼,非常强大。有需要的用户欢迎来久友下载站下载~
PHIIMAX 3D相机可以将惊艳发挥到浑然天成的地步,支持12K全景图片视频拍摄,提供高性能稳定3D VR直播方案,足以和百度3D街景媲美,搭配这款处理软件更是如虎添翼,非常强大。有需要的用户欢迎来久友下载站下载~  Photo EXIF And Watermark Maker不仅使用高质量重采样器调整图像大小,还支持各种格式,下面小编准备了破解版,有需要的赶紧来下载体验吧!
Photo EXIF And Watermark Maker不仅使用高质量重采样器调整图像大小,还支持各种格式,下面小编准备了破解版,有需要的赶紧来下载体验吧!  QQ2017
QQ2017 微信电脑版
微信电脑版 阿里旺旺
阿里旺旺 搜狗拼音
搜狗拼音 百度拼音
百度拼音 极品五笔
极品五笔 百度杀毒
百度杀毒 360杀毒
360杀毒 360安全卫士
360安全卫士 谷歌浏览器
谷歌浏览器 360浏览器
360浏览器 搜狗浏览器
搜狗浏览器 迅雷9
迅雷9 IDM下载器
IDM下载器 维棠flv
维棠flv 微软运行库
微软运行库 Winrar压缩
Winrar压缩 驱动精灵
驱动精灵