

GML Camera Calibration Toolbox是一款专业的相机校准软件。对相机的参数进行校准你可以来试试GML Camera Calibration Toolbox。该软件可以帮助用户校准相机的参数,同时还支持校准后相机的固定参数,这将帮助用户调整它以拍摄质量的照片,并且该软件也可以计算坐标和外部摄像机参数校准模式点,并且用户可以根据计算的信息校准拍摄坐标,每次的美丽时刻都可以实时掌握。此外,该软件还使用棋盘结构的校准模式,使用户可以查看相机的捕获坐标,软件仅使用奇数甚至表单来计算相机的校准参数和坐标,但这是阻碍用户的相机准确校准和计算,在校准相机过程中,软件将自动计算和校准参数,用户不需要手动操作,非常方便快捷,是一种实用性能和功能强大的相机校准软件,欢迎来临下载和使用。
安装方法:
1.找到下载的压缩包并提取它,然后双击“GML Camera Calibration.exe”应用程序以进入安装步骤。

2.选择程序使用的语言。建议选择英语。选择后,单击[确定]按钮进入软件界面。

软件功能:
校准后,计算固体相机参数和失真系数。
还可以计算校准模式点和外部摄像机参数的坐标。
每个参数都有精确度。
GML Camera Cameric Toolbox Green Edition使用棋盘作为校准模式。它仅使用奇数(甚至x奇数)正方形的校准模式(即,5×6,7×8,10x7等)。
校准过程完全自动化。有两个棋盘检测算法。第一是“方形”算法,第二是“孔”算法。
使用说明:
MSU GML Camera校准用户指南

校准
校准
具有图像的源目录
纠正图像目标目录
所有校准图像
非校正变量序列校正径向和切向失真。
单击UNTASTORT - UNISTORTOR目录菜单,然后输入UNTASTORT属性。
相机校准
·外部方形和物体边界之间的空白区域(下图中的红色标记)应至少为1平方宽度,如下所示:
校准模式

·所有方块必须清晰可见(未被封锁)。
·使用三脚架
·25张照片
·使用纸张尺寸“.3”等。
·方形尺寸为3-5厘米
·图像上的棋盘必须位于相机矩阵的所有位置。使用点浓度选项卡来控制校准模式的位置
·棋盘必须是一架飞机
·从棋盘顶部照片

倾斜角度是恒定的(例如,45度)
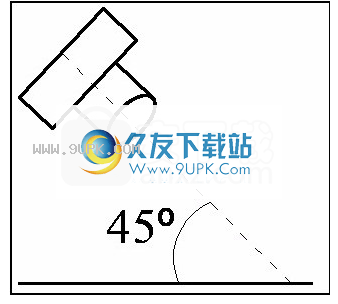
拍摄三张相机位置的照片

导出校准数据 - 表格格式
选择菜单校准 - 导出校准数据 - 表格格式以启动导出过程。

输入导出目录和基本文件后缀。
导出数据包括每个检测到的图像的两个文件。第一个(“image_name _”+“基本文件后缀”+“_ 2d”)包含相应的图像点。第二个(“image_name _”+“基本文件后缀”+“_ 3D”)包含对象点。
例如,检测图像“图像1”的5X6校准图案。
文件“image1_zhang_2d”是
x(1,1)y(1,1)x(1,2)y(1,2)x(1,3)y(1,3)x(1,4)y(1, 4)
X(2,1)y(2,1)x(2,2)y(2,2)x(2,3)y(2,3)x(2,4)y(2,4)
x(3,1)y(3,1)x(3,2)y(3,2)x(3,3)y(3,3)x(3,4)y(3,4)
x(4,1)y(4,1)x(4,2)y(4,2)x(4,3)y(4,3)x(4,4)y(4,4)
5,1)
Y(5,1)x(5,2)y(5,2)x(5,3)y(5,3)x(5,4)y(5,4)
行数为(校准图案宽度 - 1)* 2。
列数是校准模式高度 - 1。
文件“image1_zhang_3d”类似于“image1_zhang_2d”,但点也是坐标z = 0。
导出校准数据 - Willson和Heikkila格式
选择菜单校准 - 导出校准数据 - Willson和Heikkila格式开始导出过程。
导出数据包括每个检测到的图像的文件。此文件包含对象点和相应的图像点。
例如,检测图像“图像1”的5X6校准图案。
文件“image1_wh”是
x(1,1)y(1,1)z(1,1)x(1,1)y(1,1)
x(1,2)y(1,2)z(1,2)x(1,2)y(1,2)
1,3)y(1,3)z(1,3)x(1,3)y(1,3)
x(1,4)y(1,4)x(1,4)y(1,4)
x(2,1)y(2,1)z(2,1)x(2,1)y(2,1)
x(2,2)y(2,2)z(2,2)x(2,2)y(2,2)
......
导出校准数据 - 外部摄像机参数
选择菜单校准 - 导出校准数据 - 外部摄像机参数以启动导出过程。
导出数据包括每个图像的翻译(t)和旋转(r)vectors。
文件格式为:
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)/ /是第一图像
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)/是第二图像
......
导出校准数据 - 外部摄像机参数(格式II)
选择菜单校准 - 导出校准数据 - 外部摄像机参数(格式II)启动导出过程。
导出数据包括每个检测到的图像的文件。此文件包含逆外部摄像机矩阵。
文件格式是:
其中R是旋转矩阵,T是平移矢量。
导校准数据 - 内在的摄像机参数
选择菜单校准 - 导出校准数据 - 内置摄像机参数以启动导出过程。
导出数据包含文件。此文件包含内部相机矩阵。
文件格式为:
[FX 0 CX]
[0 FY CY]
[0 0 1]
CX,CY是主要点,FX,FY是焦距。
导出校准数据 - 具有失真的固有相机参数
选择菜单校准 - 导出校准数据 - 具有失真的固有相机参数,以启动导出过程。
导出数据包括两个文件。后缀“内在”中的第一个包含上述格式的固有相机矩阵。第二个具有后缀“失真”并包含四个失真系数(前两个用于径向,第二用于切线失真)。
校准数据 - 板之间的输出转换参数
选择菜单校准 - 导出校准数据板之间的转换参数以启动导出过程。
如果场景中有两个或多个校准对象,则可以使用此过程来保存您的相对位置。
生成的文件格式是:
[DX DY DZ RX RY RZ]
其中(DX DY DZ)是旋转向量,(RX RY RZ)是翻译矢量。这些向量允许从当前对象的坐标系(在“结果”标签中为基础知识的基础知识)的坐标系来坐标系。文件的每一行对应于每个模板(基本模板除外),该行将行添加到模板的顺序到项目。
软件特色:
完整的免费,不要为用户收取任何费用
操作简单,没有复杂的步骤
可以帮助用户校准相机的坐标
此同时,您还可以设置相机的拍摄参数。
支持被驱逐软件,基本文件的后缀,导出的数据包括每个检测到的图像
支持将校准数据导出到计算机以保存,以便用户稍后可以查看它们
外部摄像机的参数可以导出,包括每个图像的翻译(t)和旋转(r)向量
 推广助手神器 1.14安卓版
推广助手神器 1.14安卓版 微丢丢 2.3.6安卓版
微丢丢 2.3.6安卓版 微商精灵 1.0安卓版
微商精灵 1.0安卓版 仪器之家 1.0.4安卓版
仪器之家 1.0.4安卓版 帮得利 3.1.8安卓版
帮得利 3.1.8安卓版 微加加 2.0安卓版
微加加 2.0安卓版 自转 3.4.4安卓版
自转 3.4.4安卓版 邻至邻 3.2.4安卓版
邻至邻 3.2.4安卓版 淘米吧 3.0.6.0安卓版
淘米吧 3.0.6.0安卓版 洋葱企业版 1.0安卓版
洋葱企业版 1.0安卓版 爱啪啪 12.2安卓版
爱啪啪 12.2安卓版 车天 1.0安卓版
车天 1.0安卓版 菜鸟裹裹电脑版是一款阿里巴巴官方出品的提供免费查快递、优惠寄快递、代收包裹等快递相关服务的快递服务软件。支持淘宝、天猫、京东、苏宁等全网包裹自动跟踪,覆盖国内外140多家快递公司。随时随地查询自己的快递身在...
菜鸟裹裹电脑版是一款阿里巴巴官方出品的提供免费查快递、优惠寄快递、代收包裹等快递相关服务的快递服务软件。支持淘宝、天猫、京东、苏宁等全网包裹自动跟踪,覆盖国内外140多家快递公司。随时随地查询自己的快递身在...  QQ娇喘恶搞动态头像制作工具能够帮助小伙伴们制作带有娇喘声音恶搞qq头像的qq辅助工具。该款工具能够帮助用户非常便捷的制作QQ头像,制作后的QQ头像极具恶搞,点进去会有娇喘,非常有趣,并且还为用户提供了其它好玩的...
QQ娇喘恶搞动态头像制作工具能够帮助小伙伴们制作带有娇喘声音恶搞qq头像的qq辅助工具。该款工具能够帮助用户非常便捷的制作QQ头像,制作后的QQ头像极具恶搞,点进去会有娇喘,非常有趣,并且还为用户提供了其它好玩的...  MacDrive8 注册机是专门为了想要使用MacDrive8的用户找到的MacDrive8注册软件。可以让用户免费获得MacDrive8的使用权,使用方法简单,产生序列号,输入电脑就可以了,有需要的朋友可以来下载。
使用方法:
能用在...
MacDrive8 注册机是专门为了想要使用MacDrive8的用户找到的MacDrive8注册软件。可以让用户免费获得MacDrive8的使用权,使用方法简单,产生序列号,输入电脑就可以了,有需要的朋友可以来下载。
使用方法:
能用在...  傲游辐射速查是一款非常有用的辐射数据检测工具。来自国家环保部实时辐射、空机指数,如果你平时非常的关心你居住环境的各项环保指数辐射指标可以用傲游辐射查询软件进行关注。
软件说明
负责核安全和辐射安全...
傲游辐射速查是一款非常有用的辐射数据检测工具。来自国家环保部实时辐射、空机指数,如果你平时非常的关心你居住环境的各项环保指数辐射指标可以用傲游辐射查询软件进行关注。
软件说明
负责核安全和辐射安全...  网上预约系统管理平台顾名思义是一款让想要在网上预约节约时间的朋友们准备的好用预约管理软件。网上预约系统管理平台采用了BS架构开发,利用.NET技术和sqlserver数据库进行系统的开发,所有用户无需安装和繁琐的配置,...
网上预约系统管理平台顾名思义是一款让想要在网上预约节约时间的朋友们准备的好用预约管理软件。网上预约系统管理平台采用了BS架构开发,利用.NET技术和sqlserver数据库进行系统的开发,所有用户无需安装和繁琐的配置,...  QQ2017
QQ2017 微信电脑版
微信电脑版 阿里旺旺
阿里旺旺 搜狗拼音
搜狗拼音 百度拼音
百度拼音 极品五笔
极品五笔 百度杀毒
百度杀毒 360杀毒
360杀毒 360安全卫士
360安全卫士 谷歌浏览器
谷歌浏览器 360浏览器
360浏览器 搜狗浏览器
搜狗浏览器 迅雷9
迅雷9 IDM下载器
IDM下载器 维棠flv
维棠flv 微软运行库
微软运行库 Winrar压缩
Winrar压缩 驱动精灵
驱动精灵